Основы радиоэлектроники и связи
4. Элементы статистической радиотехники : 4.5. Основы теории обнаружения и различения сигнала на фоне помех
|
Основы радиоэлектроники и связи |
|
|
4. Элементы статистической радиотехники : 4.5. Основы теории обнаружения и различения сигнала на фоне помех |
|
4.5.5 Оптимальное различение полностью известных сигналовДля задач различения обоснованным является применение критерия идеального наблюдателя. Пусть принятое колебание представляет собой сумму: Здесь n(t) – гауссовский белый шум, s1(t) , s 2(t) – детерминированные сигналы. Параметр l может принимать одно из двух значений: l =1 – присутствует только сигнал s1(t) , l =0 – присутствует только сигнал s2(t) . Априорные вероятности присутствия каждого из сигналов известны. По принятой реализации нужно решить, какое именно значение имеет параметр l , т.е. какой из сигналов присутствует в реализации. Если алгоритм обнаружения полностью известного
сигнала на фоне белого гауссовского шума состоит в вычислении корреляционной
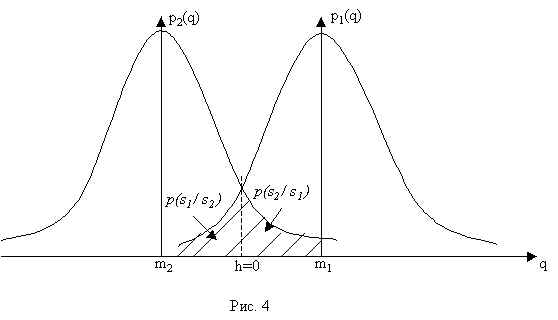
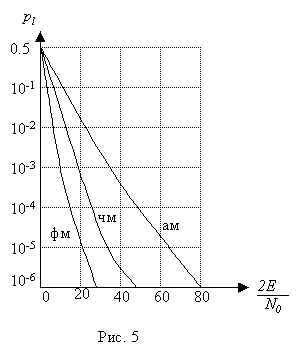
функции Сам алгоритм принятия решения можно записать следующим образом: Если в u(t) присутствует сигнал s1(t) , то где где Как показывает анализ, при равных мощностях сигналов E1=E2=E , равных вероятностях наличия первого или второго сигнала, плотности вероятности p1(q) и p2(q) имеют нормальный закон распределения с математическими ожиданиями m1 , m 2 и дисперсиями D1 и D2 , причем где Графики p1(q) и p2(q) изображены на рис. 4 Общий участок значений q (заштрихованная область) определяет условные вероятности принятия решения о наличии одного сигнала, когда в действительности присутствует другой. Они определяют вероятность ошибки в принятом решении. Величина h=m 1-m 2 определяет порог принятого решения. Вероятность суммарной ошибки будет равна: где Ф(x) интеграл вероятности. Меньшей вероятностью ошибки pl обладают сигналы, для которых интервал взаимной корреляции минимален. Если rs=0 , то сигналы ортогональны, при rs=1 имеет место равенство s1(t)=s2(t) , а при rs=-1 , – s1(t)=-s2(t) . Лучше всего различать сигналы, имеющие rs=-1 . В этом случае говорят, что сигналы обладают наибольшей помехоустойчивостью при заданном отношении сигнал/шум (E/N0 ) . Ясно, что чем меньше высота перекрытия, определяющего область неправильного принятия решения, тем больше вероятность ошибки. Линиями потенциальной помехоустойчивости называют кривые, характеризующие зависимость вероятности ошибки pl от отношения сигнал/шум в оптимальном приемнике. На рис. 5 показаны такие кривые для детерминированных амплитудно-, частотно-, и фазо-манипулированных сигналов. Для амплитудно-манипулированных сигналов В этом случае на основе критерия идеального наблюдателя нужно решить задачу обнаружения сигнала s1(t) на фоне шума. При этом При априорных вероятностях наличия и отсутствия
сигнала, равных 0.5, порог принятия решения Для частотно - манипулированных сигналов Коэффициент взаимной корреляции при этом равен На практике величина Для фазоманипулированных сигналов используются сигналы В этом случае Сравнивая графики на рис. 5, видим, что при одной и той же энергии сигналов из трех рассмотренных видов манипуляции наибольшей потенциальной помехоустойчивостью обладает фазовая манипуляция. Смысл рассмотрения оптимального приема детерминированных сигналов на фоне белого шума состоит в том, что результаты решения таких задач можно использовать в качестве теоретических «эталонов», позволяющих получить максимально возможную (потенциальную) помехоустойчивость. Результаты оптимальной обработки сигналов с неизвестными параметрами целесообразно сравнивать с соответствующими результатами для аналогичных сигналов с известными параметрами. |
|
© Андреевская Т.М., РЭ, МГИЭМ, 2004 |
 и сравнения ее с порогом, то в случае задачи различения приемник, работающий
по критерию идеального наблюдателя, должен состоять из двух корреляторов,
вычисляющих значение
и сравнения ее с порогом, то в случае задачи различения приемник, работающий
по критерию идеального наблюдателя, должен состоять из двух корреляторов,
вычисляющих значение  и
и  ,
вычитающего устройства, определяющего разность
,
вычитающего устройства, определяющего разность 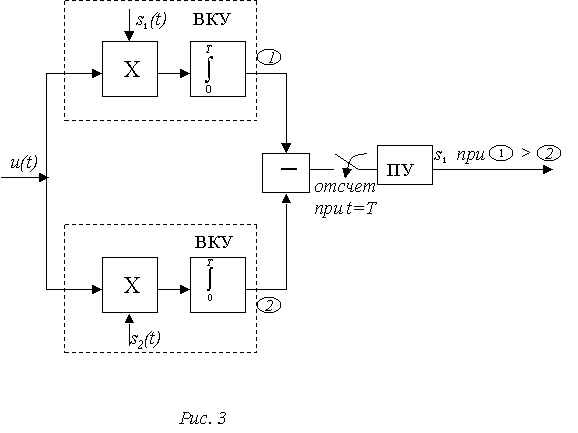
 .
.

 характеризует коэффициент взаимной
корреляции при нулевом сдвиге сигналов s1(t)
и s2(t) .
характеризует коэффициент взаимной
корреляции при нулевом сдвиге сигналов s1(t)
и s2(t) .

 .
.
 ,
,




 .
. .
.